SA-RIO-SW 01")










In the constantly-developing landscape of industrial automation, ensuring the safety of labors remains an utmost concern. As technologies such as Autonomous Mobile Robots (AMRs) become increasingly widespread in industrial settings, it becomes important to establish firm standards and protocols to reduce potential risks associated with their operation. This is where International Organization for Standardization (ISO) standards, particularly ISO 13849-1 and ISO 3691-4, plays a significant role.
ISO 13849-1 serves as a foundation in the safety evaluation, providing comprehensive guidelines for designing and integrating safety-related components within control systems. This standard offers a systematic approach to assessing the safety performance of machinery, ensuring that risks are adequately managed throughout the equipment’s life cycle. Meanwhile, ISO 3691-4 focuses specifically on the safety requirements for driverless industrial trucks, a category that encompasses AMRs, describing essential safety measures for their operation.
Performance Level (PL)
Central to these standards is the concept of Performance Levels (PL), which serve as a standardized classification system for assessing the technical safety capabilities of systems and devices. Derived from ISO 13849-1, PL plays a key role in determining the reliability and effectiveness of safety functions within AMRs. Both ISO 13849-1 and ISO 3691-4 utilize PL as a benchmark for safety compliance, ensuring that AMRs meet specified performance criteria to reduce potential hazards in industrial environments. Figure 1 shows Required Performance Level (PLr) and Performance Level (PL).

Figure 1: PLr and PL (From ISO 13849-1:2006)
Source: Safety Knowledge. KEYENCE (MALAYSIA) SDN BHD. https://www.keyence.com.my/ss/products/safetyknowledge/performance/level/
Under ISO 3691-4, specific safety requirements are outlined to address various scenarios encountered in the operation of AMRs. For example, firm measures are mandated for speed control to monitor and regulate the movement speed of AMRs within predefined limits. Components such as encoders, motion monitoring systems, and safety controllers must adhere to designated PL levels to ensure effective speed control and lessen the risk of collisions or accidents.
Similarly, the detection of obstacles or personnel in the path of AMRs necessitates robust sensor systems capable of accurately identifying potential hazards. Safety functions related to obstacle detection and avoidance are assigned specific PL requirements under ISO 3691-4, ensuring that AMRs possess the capability to detect and react promptly to unforeseen obstacles or personnel in their operating environment.
In addition to outlining safety requirements, ISO 3691-4 prescribes accurate verification testing methods to validate compliance and assess the efficacy of safety measures implemented in AMRs. These verification tests encompass a range of scenarios designed to simulate real-world operating conditions and evaluate the AMR’s ability to detect and respond to various safety-critical events effectively.

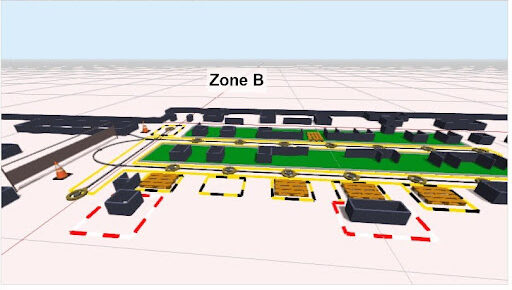
Figure 2: Safety stop and speed reduction region for AMR in NavWiz
In DF AMRs, there are two separate systems that work together to ensure optimal safety performance:
1. NavWiz Obstacle Sensing System: This system uses obstacle detection capabilities to anticipate and respond to potential hazards immediately. Upon detecting obstacles within “Speed Reduction 1” and “Speed Reduction 2” regions (refer Figure 2), the NavWiz system instantly reduces the speed command to a pre-configured value. Consequently, the AMR adjusts its movement speed to navigate around the obstacle seamlessly, enhancing overall safety in the operational environment. In scenarios where an obstacle is detected within the “Safety Stop Region”, NavWiz triggers an immediate stop, bringing the AMR to a complete stop to prevent any potential collisions or accidents.
2. Safety Controller System: This control system operates independently in parallel with the NavWiz Obstacle Sensing System. It continuously monitors the environment for obstacles and evaluates the AMR’s current speed relative to the fixed safety approach. If obstacles are detected within the Speed Reduction Regions and the AMR’s speed exceeds the allowable limit, Safety Controller System will activate a safety stop.
This happens when the NavWiz system fails to adequately reduce speed in response to detected obstacles, the Safety Controller intervenes by triggering a safety stop. Similarly, if an obstacle is detected at the Safety Stop Region and the AMR’s speed is not reduced to zero, the Safety Controller will initiate a safety stop. It cut-off the motor power to make a forceful stop to the motor’s operation, minimizing the risk of potential harm.
In conclusion, ISO 13849-1 and 3691-4 sets important standards for ensuring the safety and reliability of AMRs in industrial settings. Industries can lower the risks associated with the operation of AMRs, safeguarding personnel and enhancing overall workplace safety. Furthermore, DF offers advanced features designed to enhance AMR safety, seamlessly integrable into existing systems. This dedication not only ensures regulatory compliance but also highlights our proactive approach to optimizing workplace safety.
For more information, feel free to contact us via email at sales@dfautomation.com